Research Portfolio

Finding a solution to nonlinear Bayesian state-estimation problems is intractable and has engaged many researchers since Kalman’s seminal paper was published in 1960. The selection of suitable sub-optimal approximate solutions to the recursive Bayesian estimation problem represents a trade-off between global optimality on one hand and computational tractability (and robustness) on the other hand.
During my PhD research, I developed a new Bayesian filter called the Cubature Kalman Filter (CKF) that solves discrete-time non-linear filtering problems efficiently. When the conditional probability densities are assumed to be Gaussian, which holds in many cases, the optimal Bayesian filter can be reduced to the problem of computing multi-dimensional Gaussian-weighted moment integrals in the time update and measurement update steps. To compute these integrals numerically, two transformations are required: (i) Non-standard Gaussian-weighted integrals are transformed into standard Gaussian-weighted integrals using the change of variables. (ii) These integrals are then transformed from Cartesian coordinates to spherical-radial coordinates. A third-degree spherical-radial cubature rule is used to compute them numerically. The resulting cubature rule uses a set of 2n cubature points, where n is the state-vector dimension.
The CKF is a predictor-corrector model-based estimation strategy that extracts second-order information from sensor measurements optimally and recursively. It is the closest known approximate filter that preserves second-order information according to the maximum entropy principle. As per Google Scholar, my research paper on the CKF has received over 3000 citations. A detailed derivation of this method can be found in my PhD thesis below.
Four Variants of Cubature Kalman Filter
i. Continuous-Discrete CKF (CD-CKF)
To handle nonlinear state-space models of the continuous-discrete kind, the extended version of the CKF called the Continuous-Discrete Cubature Kalman Filter (CD-CKF) can be used. The process equation, modeled as stochastic ordinary differential equations, is transformed into a set of stochastic difference equations using the Itô-Taylor expansion of order 1.5. The third-degree cubature rule is used to numerically compute integrals. The usefulness of the CD-CKF is illustrated by applying it to a radar tracking problem here.
ii. Square-root CKF (SCKF)
The CKF can encounter numerical problems, including the loss of positive definiteness in covariance matrices due to operations such as matrix inversion and subtraction. This loss of positive definiteness can prevent the CKF from being run continuously. The Square-root CKF (SCKF) resolves these issues by propagating the square-roots of various error covariance matrices. The usefulness of the SCKF is illustrated by applying it to a robotic problem implemented in a finite word-length machine here.
iii. Cubature Kalman Smoother (CKS)
The cubature Kalman smoother (CKS) addresses nonlinear smoothing problems. The CKS is derived by reformulating matrix equations to propagate the square-root error covariances, which ensures reliable implementation in embedded systems with fixed precision or when the inference problem is ill-conditioned. The usefulness of the CKS is illustrated by applying it to track a ballistic target on reentry here.
iv. Cubature Information Filter (CIF)
The Cubature Information Filter (CIF) is a modified version of the CKF that replaces state estimates and covariances with information vectors and matrices. The CIF is derived using linear fusion theory and advanced matrix algebra. The usefulness of the CIF is illustrated in a multi-sensor fusion setting here.
Two sample applications of CKF
Radar Tracking
The interacting multiple model (IMM) filter and square-root version of CKF are used in this work to estimate the states of a maneuvering aircraft using radar measurements.
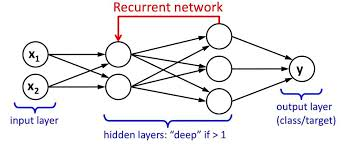
Training of Recurrent Neural Networks (RNNs)
The CKF is used in this work to train recurrent neural networks (RNNs). Techniques for tuning the CKF are suggested to improve numerical stability and performance during the training period. Specifically, the usefulness of training RNNs using the CKF is illustrated by applying it to reconstruct the chaotic Mackey-Glass time-series that is sensitive to initial conditions.
Miscellaneous
PhD Candidacy Exam
My PhD candidacy exam included three questions at the graduate level and four questions at the undergraduate level. This was a take-home exam. I was required to complete it within a week and defend it in front of a panel of professors.
Masters Thesis
Radar Warning Receivers on tactical aircraft passively collect electromagnetic signals to assess the threat posed by hostile radars like Multi-Function Radars (MFRs) in complex electronic warfare environments. This masters work involves developing a grid filter approach to estimate the operational mode probabilities of MFRs using pre-trained Observable Operator Models and Hidden Markov Models in a maximum a posteriori sense.
Letters of Commendation received for my PhD work
- Here are three sample letters received from industry and academia after a formal publication of my PhD work.
- Thank you to others whom I could not include here.